Implements a rigid kinematic loop (or body-to-body) constraints as described in Ch. 8 of Featherstone's Rigid Body Dynamics Algorithms book. More...
#include <Constraint_Loop.h>
 Inheritance diagram for LoopConstraint:
Inheritance diagram for LoopConstraint:
Public Member Functions | |
| LoopConstraint () | |
| LoopConstraint (const unsigned int bodyIdPredecessor, const unsigned int bodyIdSuccessor, const Math::SpatialTransform &XPredecessor, const Math::SpatialTransform &XSuccessor, const Math::SpatialVector &constraintAxisInPredessor, bool enableBaumgarteStabilization=false, double stabilizationTimeConstant=0.1, const char *loopConstraintName=NULL, unsigned int userDefinedId=std::numeric_limits< unsigned int >::max(), bool positionLevelConstraint=true, bool velocityLevelConstraint=true) | |
| void | bind (const Model &model) override |
| Any local memory that has a dimension of N, where N is the length of QDot, is resized in this function. More... | |
| void | calcConstraintJacobian (Model &model, const double time, const Math::VectorNd &Q, const Math::VectorNd &QDot, Math::MatrixNd &GSysUpd, ConstraintCache &cache, bool updateKinematics=false) override |
In this function the matrix  of this contraint is inserted into the system constraint Jacobian of this contraint is inserted into the system constraint Jacobian  (GSysOutput). The submatrix begins at rowInSystem, has sizeOfConstraint number of rows, and fills the full number of columns in G. More... (GSysOutput). The submatrix begins at rowInSystem, has sizeOfConstraint number of rows, and fills the full number of columns in G. More... | |
| void | calcGamma (Model &model, const double time, const Math::VectorNd &Q, const Math::VectorNd &QDot, const Math::MatrixNd &GSys, Math::VectorNd &gammaSysUpd, ConstraintCache &cache, bool updateKinematics=false) override |
In this function the vector  of this constraint is inserted into the right-hand-side vector of this constraint is inserted into the right-hand-side vector  of the system. The vector begins at rowInSystem, and has sizeOfConstraint rows. More... of the system. The vector begins at rowInSystem, and has sizeOfConstraint rows. More... | |
| void | calcPositionError (Model &model, const double time, const Math::VectorNd &Q, Math::VectorNd &errSysUpd, ConstraintCache &cache, bool updateKinematics=false) override |
In this function the sub vector  of this constraint is inserted into the position error vector of the system. If the constraint is velocity-level constraint or higher (noted in the boolean member variable positionConstraint) this should be set to zero. The vector of this constraint is inserted into the position error vector of the system. If the constraint is velocity-level constraint or higher (noted in the boolean member variable positionConstraint) this should be set to zero. The vector  begins at rowInSystem, and has sizeOfConstraint rows. More... begins at rowInSystem, and has sizeOfConstraint rows. More... | |
| void | calcVelocityError (Model &model, const double time, const Math::VectorNd &Q, const Math::VectorNd &QDot, const Math::MatrixNd &GSys, Math::VectorNd &derrSysUpd, ConstraintCache &cache, bool updateKinematics=false) override |
In this function the sub vector  of this constraint is inserted into the position error vector of the system. If the constraint is an acceleration-level constraint (noted in the boolean member variable velocityConstraint) this sub vector should be zero. The vector begins at rowInSystem, and has sizeOfConstraint rows. More... of this constraint is inserted into the position error vector of the system. If the constraint is an acceleration-level constraint (noted in the boolean member variable velocityConstraint) this sub vector should be zero. The vector begins at rowInSystem, and has sizeOfConstraint rows. More... | |
| void | calcConstraintForces (Model &model, const double time, const Math::VectorNd &Q, const Math::VectorNd &QDot, const Math::MatrixNd &GSys, const Math::VectorNd &lagrangeMultipliersSys, std::vector< unsigned int > &constraintBodiesUpd, std::vector< Math::SpatialTransform > &constraintBodyFramesUpd, std::vector< Math::SpatialVector > &constraintForcesUpd, ConstraintCache &cache, bool resolveAllInRootFrame=false, bool updateKinematics=false) override |
| This function resolves the generalized forces this constraint applies to the system into the wrenches that are applied to the bodies that are involved in the constraint. More... | |
| const std::vector< Math::SpatialVector > & | getConstraintAxes () |
| void | appendConstraintAxis (const Math::SpatialVector &constraintAxis, bool positionLevelConstraint=true, bool velocityLevelConstraint=true) |
| Public Member Functions inherited from Constraint | |
| virtual void | bind (const Model &model)=0 |
| Any local memory that has a dimension of N, where N is the length of QDot, is resized in this function. More... | |
| virtual void | calcConstraintJacobian (Model &model, const double time, const Math::VectorNd &Q, const Math::VectorNd &QDot, Math::MatrixNd &GSysOutput, ConstraintCache &cache, bool updateKinematics=false)=0 |
| In this function the matrix of this contraint is inserted into the system constraint Jacobian (GSysOutput). The submatrix begins at rowInSystem, has sizeOfConstraint number of rows, and fills the full number of columns in G. More... | |
| virtual void | calcGamma (Model &model, const double time, const Math::VectorNd &Q, const Math::VectorNd &QDot, const Math::MatrixNd &GSys, Math::VectorNd &gammaSysOutput, ConstraintCache &cache, bool updateKinematics=false)=0 |
| In this function the vector of this constraint is inserted into the right-hand-side vector of the system. The vector begins at rowInSystem, and has sizeOfConstraint rows. More... | |
| virtual void | calcPositionError (Model &model, const double time, const Math::VectorNd &Q, Math::VectorNd &errSysOutput, ConstraintCache &cache, bool updateKinematics=false)=0 |
| In this function the sub vector of this constraint is inserted into the position error vector of the system. If the constraint is velocity-level constraint or higher (noted in the boolean member variable positionConstraint) this should be set to zero. The vector begins at rowInSystem, and has sizeOfConstraint rows. More... | |
| virtual void | calcVelocityError (Model &model, const double time, const Math::VectorNd &Q, const Math::VectorNd &QDot, const Math::MatrixNd &GSys, Math::VectorNd &derrSysOutput, ConstraintCache &cache, bool updateKinematics=false)=0 |
| In this function the sub vector of this constraint is inserted into the position error vector of the system. If the constraint is an acceleration-level constraint (noted in the boolean member variable velocityConstraint) this sub vector should be zero. The vector begins at rowInSystem, and has sizeOfConstraint rows. More... | |
| virtual void | calcConstraintForces (Model &model, const double time, const Math::VectorNd &Q, const Math::VectorNd &QDot, const Math::MatrixNd &GSys, const Math::VectorNd &LagrangeMultipliersSys, std::vector< unsigned int > &constraintBodiesOutput, std::vector< Math::SpatialTransform > &constraintBodyFramesOutput, std::vector< Math::SpatialVector > &constraintForcesOutput, ConstraintCache &cache, bool resolveAllInRootFrame=false, bool updateKinematics=false)=0 |
| This function resolves the generalized forces this constraint applies to the system into the wrenches that are applied to the bodies that are involved in the constraint. More... | |
| virtual | ~Constraint () |
| Constraint () | |
| Constraint (const char *nameOfConstraint, unsigned int typeOfConstraint, unsigned int sizeOfConstraint, unsigned int userDefinedIdNumber) | |
| void | addToConstraintSet (const unsigned int rowIndex) |
| This function is called by the functions in ConstraintSet that add a Constraint to the system. DO NOT TOUCH THIS. More... | |
| unsigned int | getUserDefinedId () |
| void | setUserDefinedId (unsigned int userDefinedId) |
| void | getConstraintJacobian (const Math::MatrixNd &GSys, Math::MatrixNd &GConstraint) |
| void | getGamma (const Math::VectorNd &gammaSys, Math::VectorNd &gammaConstraint) |
| void | getPositionError (const Math::VectorNd &errSys, Math::VectorNd &errConstraint) |
| void | getVelocityError (const Math::VectorNd &derrSys, Math::VectorNd &derrConstraint) |
| void | getBaumgarteStabilizationParameters (Math::Vector2d &bgParamsUpd) |
| void | getBaumgarteStabilizationForces (const Math::VectorNd &errPos, const Math::VectorNd &errVel, Math::VectorNd &baumgarteForces) |
| void | addInBaumgarteStabilizationForces (const Math::VectorNd &errPosSys, const Math::VectorNd &errVelSys, Math::VectorNd &gammaSysOutput) |
| unsigned int | getConstraintType () |
| unsigned int | getConstraintSize () |
| unsigned int | getConstraintIndex () |
| void | setBaumgarteTimeConstant (double tStab) |
| Calculates and sets the Baumgarte stabilization coefficients as a function of tStab, the approximate time-constant of stabilization. More... | |
| void | setEnableBaumgarteStabilization (bool flagEnableBaumgarteStabilization) |
| bool | isBaumgarteStabilizationEnabled () |
| void | enableConstraintErrorFromPositionLevel (unsigned int constraintSubIndex) |
| : Will set the vectors positionConstraint and velocityConstraint to be consistent with a constraint that is described from the position-level up. More... | |
| void | enableConstraintErrorFromVelocityLevel (unsigned int constraintSubIndex) |
| : Will set the vectors positionConstraint and velocityConstraint to be consistent with a constraint that is described from the velocity-level up: position errors will be set to zero while velocity errors will be computed. More... | |
| void | enableConstraintErrorFromAccelerationLevel (unsigned int constraintSubIndex) |
| : Will set the vectors positionConstraint and velocityConstraint to be consistent with a constraint that is described from the acceleration-level: both position and velocity errors will be set to zero. More... | |
| void | enableConstraintErrorFromPositionLevel () |
| : Will set the all elements in positionConstraint and velocityConstraint to be consistent with a constraint that is described from the position-level up. More... | |
| void | enableConstraintErrorFromVelocityLevel () |
| : Will set the all elements in positionConstraint and velocityConstraint to be consistent with a constraint that is described from the velocity-level up. More... | |
| void | enableConstraintErrorFromAccelerationLevel () |
| : Will set the all elements in positionConstraint and velocityConstraint to be consistent with a constraint that is described from the acceleration-level up. More... | |
| bool | getPositionLevelError (unsigned int constraintSubIndex) |
| Returns the boolean value that determines whether or not position-level errors are computed for this sub-index into this constraint. More... | |
| bool | getVelocityLevelError (unsigned int constraintSubIndex) |
| Returns the boolean value that determines whether or not velocity-level errors are computed for this sub-index into this constraint. More... | |
| const char * | getName () |
| const std::vector< unsigned int > & | getBodyIds () |
| const std::vector< Math::SpatialTransform > & | getBodyFrames () |
Private Attributes | |
| std::vector< Math::SpatialVector > | T |
| Vector of constraint axis resolved in the predecessor frame. More... | |
| double | dblA |
| A local working double. More... | |
Additional Inherited Members | |
| Protected Attributes inherited from Constraint | |
| std::string | name |
| A user defined name which is unique to this constraint set. More... | |
| unsigned int | id |
| A user defined id which is unique to this constraint set. More... | |
| unsigned int | typeOfConstraint |
| The type of this constraint. More... | |
| unsigned int | sizeOfConstraint |
| The number of rows that this constraint adds to G. More... | |
| unsigned int | rowInSystem |
| The first row in G that corresponds to this constraint. More... | |
| std::vector< unsigned int > | bodyIds |
| The index of the predecessor body in the vector of bodies in Model. More... | |
| std::vector< Math::SpatialTransform > | bodyFrames |
| Transform from the frame of the predecessor body to the constraint frame. More... | |
| Math::Vector2d | baumgarteParameters |
| bool | baumgarteEnabled |
| A flag which enables or disables Baumgarte stabilization. More... | |
| std::vector< bool > | positionConstraint |
| std::vector< bool > | velocityConstraint |
Detailed Description
Implements a rigid kinematic loop (or body-to-body) constraints as described in Ch. 8 of Featherstone's Rigid Body Dynamics Algorithms book.
For details on this constraint please do read this documentation. However note that a typical user of RBDL should not need to use any of the functions described in this class but instead should use the functions that are defined in ConstraintSet (AddContactConstraint, calcForces, calcPositionError, calcVelocityError, calcBaumgarteStabilizationForces, etc) when working with this constraint. For those interested in all of the details of this constraint and how it works please refer to the source code for this class, and its base class.
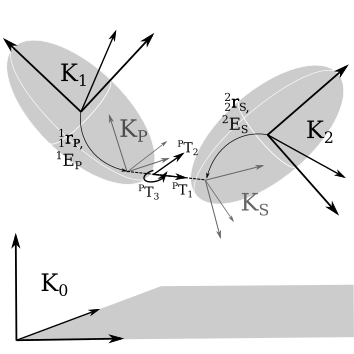
A LoopConstraint will zero the acceleration between body-fixed points  and
and  in the spatial directions
in the spatial directions  . The user specifies and by passing in the spatial transform from the origin of the predecessor body to the predecessor frame (
. The user specifies and by passing in the spatial transform from the origin of the predecessor body to the predecessor frame (  ,
,  ) and likewise for the successor body to the successor frame (
) and likewise for the successor body to the successor frame (  ,
,  ). The spatial directions that the constraint is applied are specified in the vector which is resolved in the coordinates of the predecessor frame.
). The spatial directions that the constraint is applied are specified in the vector which is resolved in the coordinates of the predecessor frame.
As with any other constraint this position-level constraint is index reduced and applied at the acceleration level. This constraint will only be satisfied at the position-level and velocity-level if, prior to enabling the constraint, the constraint equations are satisified at the position and velocity levels. When assembling the constraint the functions CalcAssemblyQ and CalcAssemblyQDot can be used to satisfy this constraint at the position and velocity levels.
During the process of integration numerical error may accumulate. To prevent this error from growing Baumgarte stabilization can be enabled using the function setEnableBaumgarteStabilization provided in the base class. Numerical drift is usually small with this constraint because is body fixed. When this constraint is used in an optimal control problem Baumgarte stabilization may also be used to guide the solver to physically valid model configurations. Without stabilization the solver may introduce large constraint errors which will otherwise not be reduced. By default Baumgarte stabilization is not enabled.
By default this constraint does have its position-level and velocity-level errors defined. This has the consequence that CalcAssemblyQ will update the position of the model to satisfy these constraints, as will
CalcAssemblyQDot at the velocity level. In addition, Baumgarte stabilization will apply forces to the model in response to constraint errors at both the position and velocity level.
Definition at line 72 of file Constraint_Loop.h.
Constructor & Destructor Documentation
◆ LoopConstraint() [1/2]
| LoopConstraint | ( | ) |
Definition at line 26 of file Constraint_Loop.cc.
◆ LoopConstraint() [2/2]
| LoopConstraint | ( | const unsigned int | bodyIdPredecessor, |
| const unsigned int | bodyIdSuccessor, | ||
| const Math::SpatialTransform & | XPredecessor, | ||
| const Math::SpatialTransform & | XSuccessor, | ||
| const Math::SpatialVector & | constraintAxisInPredessor, | ||
| bool | enableBaumgarteStabilization = false, |
||
| double | stabilizationTimeConstant = 0.1, |
||
| const char * | loopConstraintName = NULL, |
||
| unsigned int | userDefinedId = std::numeric_limits<unsigned int>::max(), |
||
| bool | positionLevelConstraint = true, |
||
| bool | velocityLevelConstraint = true |
||
| ) |
- Parameters
-
bodyIdPredecessor the identifier of the predecessor body bodyIdSuccessor the identifier of the successor body XPredecessor a spatial transform localizing the constrained frames on the predecessor body, expressed with respect to the predecessor body frame. Note the position vector should be the r_BPB (from the body's origin, to the predessor frame, in the coordinates of the body's frame) and E_BP (the rotation matrix that will rotate vectors from the coordinates of the P frame to the coordinates of the body's frame). XSuccessor a spatial transform localizing the constrained frames on the successor body, expressed with respect to the successor body frame. Note the position vector should be the r_BSB (from the body's origin, to the successor frame, in the coordinates of the body's frame) and E_BS (the rotation matrix that will rotate vectors from the coordinates of the S frame to the coordinates of the body's frame). constraintAxisInPredessor a spatial vector, resolved in the frame of the predecessor frame, indicating the axis along which the constraint acts. enableBaumgarteStabilization (optional, default false) setting this flag to true will modify the right hand side of the acceleration equation with a penaltiy term that is proportional to the constraint error scaled by a constant. stabilizationTimeConstant (optional, defaults to 0.1 sec) this value scales the strength of Baumgarte stabilization so that the settling time of the error is proportional the value given here. name a human readable name (optional, default: NULL). Set this field to a unique name (within this ConstraintSet) so that the function GetConstraintIndex can find it. userDefinedId a user defined id (optional, defaults to max()). Set this field to a unique number (within this ConstraintSet) so that the function GetConstraintIndex can find it. positionLevelConstraint (optional, defaults to true to be consistent with the original implementation): When set to true, position errors will be computed for this constraint. This has the consequence that the function CalcAssemblyQ will assemble this constraint at the position level. In addition if Baumgarte stabilization is enabled, stabilization forces will be applied as a function of the position error. velocityLevelConstraint (optional, defaults to true to be consistent with the original implementation) : This flag controls whether or not velocity errors are computed for this constraint. When velocity errors are computed they are used by CalcAssemblyQDot (to assemble this constraint at the velocity level) and by Baumgarte stabilization (if it is enabled) to modify the right hand side of the acceleration equation with a penalty term proportional to error.
Definition at line 31 of file Constraint_Loop.cc.
References Constraint::bodyFrames, Constraint::bodyIds, LoopConstraint::dblA, std::fabs(), Constraint::positionConstraint, Constraint::setBaumgarteTimeConstant(), Constraint::setEnableBaumgarteStabilization(), LoopConstraint::T, and Constraint::velocityConstraint.
Member Function Documentation
◆ appendConstraintAxis()
| void appendConstraintAxis | ( | const Math::SpatialVector & | constraintAxis, |
| bool | positionLevelConstraint = true, |
||
| bool | velocityLevelConstraint = true |
||
| ) |
- Parameters
-
constraintAxis to append. This constraintAxis must have a norm of 1 and be normal to the existing constraintAxis positionLevelConstraint if true position errors will be evaluated for this constraint entry. velocityLevelConstraint if true velocity errors will be evalulated for this constraint entry.
Definition at line 351 of file Constraint_Loop.cc.
References LoopConstraint::dblA, std::fabs(), Constraint::positionConstraint, Constraint::sizeOfConstraint, LoopConstraint::T, and Constraint::velocityConstraint.
◆ bind()
|
overridevirtual |
Any local memory that has a dimension of N, where N is the length of QDot, is resized in this function.
- Parameters
-
model a reference to the multibody model. Use the model's fields of qdot_size to size local memory (if any) that depends on the model.
Implements Constraint.
Definition at line 73 of file Constraint_Loop.cc.
◆ calcConstraintForces()
|
overridevirtual |
This function resolves the generalized forces this constraint applies to the system into the wrenches that are applied to the bodies that are involved in the constraint.
- Parameters
-
model a reference to the multibody model. time the time which is included so that rheonomic constraints might be included (in the future). Q the vector of generalized positions. QDot the vector of generalized velocities. GSys a reference to the constraint Jacobian for the entire system. If is needed in this function do not re-evaluate it but instead extract it from the system : this constraint's sub-matrix begins at rowInSystem, has sizeOfConstraint rows, and the full number of columns of GSys.
LagrangeMultipliersSys the vector of Lagrange multipliers for the entire system. The Lagrange multipliers for this constraint begin at rowInSystem and has sizeOfConstraint elements. constraintBodiesOutput contains the indices of the bodies that contain the local frames listed in constraintBodyFramesOutput. If resolveAllInRootFrame is true, all of these indicies should be set to 0: in this case all of the wrenches are resolved in the root frame. constraintBodyFramesOutput contains the local transformation from the origin of each body frame listed in constraintBodiesOutput to the frame in which the constraint wrench is applied. Note the  frame is located on the body. If resolveAllInRootFrame is true, all of these frames have their origins resolved in the global frame and their orientation set to match that tof the global frame.
frame is located on the body. If resolveAllInRootFrame is true, all of these frames have their origins resolved in the global frame and their orientation set to match that tof the global frame.constraintForcesOutput contains the wrenches that the constraint applies to the local frames listed in constraintBodyFramesOutput. Note the force is resolved in the frame.If resolveAllInRootFrame is true, this wrench should be rotated into the coordinates of the root frame.cache a ConstraintCache object which contains ample pre-allocated memory that can be used to reduce the memory footprint of each Constraint implementation. resolveAllInRootFrame When this parameter is - false: the wrenches are resolved into their local frames. - true: the wrenches are resolved into coordinates of the global frame
updateKinematics setting this flag to true will cause all calls to kinematic dependent functions to be updated using the generalized coordinates passed into this function.
Implements Constraint.
Definition at line 269 of file Constraint_Loop.cc.
References SpatialTransform::apply(), Constraint::bodyFrames, Constraint::bodyIds, RigidBodyDynamics::CalcBodyToBaseCoordinates(), RigidBodyDynamics::CalcBodyWorldOrientation(), SpatialTransform::E, SpatialTransform::r, MX_Xd_dynamic::resize(), Constraint::rowInSystem, Constraint::sizeOfConstraint, ConstraintCache::stA, ConstraintCache::stB, ConstraintCache::svecA, ConstraintCache::svecB, and LoopConstraint::T.
◆ calcConstraintJacobian()
|
overridevirtual |
In this function the matrix of this contraint is inserted into the system constraint Jacobian (GSysOutput). The submatrix begins at rowInSystem, has sizeOfConstraint number of rows, and fills the full number of columns in G.
- Parameters
-
model a reference to the multibody model. time the time which is included so that rheonomic constraints might be included (in the future). Q the vector of generalized positions. QDot the vector of generalized velocities. GSysOutput a reference to the constraint Jacobian for the entire system. Insert the G sub-matrix for this constraint beginning and rowInSystem, with a length sizeOfConstraint rows, and a width of the full number of columns in GSysOutput. cache a ConstraintCache object which contains ample pre-allocated memory that can be used to reduce the memory footprint of each Constraint implementation. updateKinematics setting this flag to true will cause all calls to kinematic dependent functions to be updated using the generalized coordinates passed into this function.
Implements Constraint.
Definition at line 83 of file Constraint_Loop.cc.
References SpatialTransform::apply(), MX_Xd_dynamic::block(), Constraint::bodyFrames, Constraint::bodyIds, RigidBodyDynamics::CalcBodyToBaseCoordinates(), RigidBodyDynamics::CalcBodyWorldOrientation(), RigidBodyDynamics::CalcPointJacobian6D(), MX_Xd_dynamic::cols(), SpatialTransform::E, ConstraintCache::mat6NA, ConstraintCache::mat6NB, SpatialTransform::r, Constraint::rowInSystem, MX_Xd_dynamic::setZero(), Constraint::sizeOfConstraint, ConstraintCache::stA, ConstraintCache::svecA, and LoopConstraint::T.
◆ calcGamma()
|
overridevirtual |
In this function the vector of this constraint is inserted into the right-hand-side vector of the system. The vector begins at rowInSystem, and has sizeOfConstraint rows.
- Parameters
-
model a reference to the multibody model. time the time which is included so that rheonomic constraints might be included (in the future). Q the vector of generalized positions. QDot the vector of generalized velocities. GSys a reference to the constraint Jacobian for the entire system. If is needed in this function do not re-evaluate it but instead extract it from the system . gammaSysOutput the system's gamma vector. Insert the gamma sub-vector for this constraint beginning and rowInSystem and with a length of sizeOfConstraint rows. cache a ConstraintCache object which contains ample pre-allocated memory that can be used to reduce the memory footprint of each Constraint implementation. updateKinematics setting this flag to true will cause all calls to kinematic dependent functions to be updated using the generalized coordinates passed into this function.
Implements Constraint.
Definition at line 122 of file Constraint_Loop.cc.
References SpatialTransform::apply(), Constraint::bodyFrames, Constraint::bodyIds, RigidBodyDynamics::CalcBodyToBaseCoordinates(), RigidBodyDynamics::CalcBodyWorldOrientation(), RigidBodyDynamics::CalcPointAcceleration6D(), RigidBodyDynamics::CalcPointVelocity6D(), RigidBodyDynamics::Math::crossm(), SpatialTransform::E, SpatialTransform::r, Constraint::rowInSystem, Constraint::sizeOfConstraint, ConstraintCache::stA, ConstraintCache::svecA, ConstraintCache::svecB, ConstraintCache::svecC, ConstraintCache::svecD, ConstraintCache::svecE, ConstraintCache::svecF, LoopConstraint::T, and ConstraintCache::vecNZeros.
◆ calcPositionError()
|
overridevirtual |
In this function the sub vector of this constraint is inserted into the position error vector of the system. If the constraint is velocity-level constraint or higher (noted in the boolean member variable positionConstraint) this should be set to zero. The vector begins at rowInSystem, and has sizeOfConstraint rows.
- Parameters
-
model a reference to the multibody model time the time which is included so that rheonomic constraints might be included (in the future). Q the vector of generalized positions. errSysOutput the system's constraint position error vector. Insert the position error sub-vector for this constraint beginning and rowInSystem and with a length of sizeOfConstraint rows. cache a ConstraintCache object which contains ample pre-allocated memory that can be used to reduce the memory footprint of each Constraint implementation. updateKinematics setting this flag to true will cause all calls to kinematic dependent functions to be updated using the generalized coordinates passed into this function.
Implements Constraint.
Definition at line 176 of file Constraint_Loop.cc.
References Constraint::bodyFrames, Constraint::bodyIds, RigidBodyDynamics::CalcBodyToBaseCoordinates(), RigidBodyDynamics::CalcBodyWorldOrientation(), SpatialTransform::E, ConstraintCache::mat3A, Constraint::positionConstraint, SpatialTransform::r, Constraint::rowInSystem, Constraint::sizeOfConstraint, ConstraintCache::stA, ConstraintCache::stB, ConstraintCache::svecA, and LoopConstraint::T.
◆ calcVelocityError()
|
overridevirtual |
In this function the sub vector of this constraint is inserted into the position error vector of the system. If the constraint is an acceleration-level constraint (noted in the boolean member variable velocityConstraint) this sub vector should be zero. The vector begins at rowInSystem, and has sizeOfConstraint rows.
- Parameters
-
model a reference to the multibody model. time the time which is included so that rheonomic constraints might be included (in the future). Q the vector of generalized positions. QDot the vector of generalized velocities. GSys a reference to the constraint Jacobian for the entire system. If is needed in this function do not re-evaluate it but instead extract it from the system : this constraint's sub-matrix begins at rowInSystem, has sizeOfConstraint rows, and the full number of columns of GSys.
derrSysOutput the system's constraint velocity error vector. Insert the velocity error sub-vector for this constraint beginning and rowInSystem and with a length of sizeOfConstraint rows. cache a ConstraintCache object which contains ample pre-allocated memory that can be used to reduce the memory footprint of each Constraint implementation. updateKinematics setting this flag to true will cause all calls to kinematic dependent functions to be updated using the generalized coordinates passed into this function.
Implements Constraint.
Definition at line 238 of file Constraint_Loop.cc.
References MX_Xd_dynamic::cols(), Constraint::rowInSystem, Constraint::sizeOfConstraint, and Constraint::velocityConstraint.
◆ getConstraintAxes()
|
inline |
- Returns
- the vector of constraint axes which are resolved in the coordinate system of the predecessor frame
Definition at line 215 of file Constraint_Loop.h.
Field Documentation
◆ dblA
|
private |
A local working double.
Definition at line 236 of file Constraint_Loop.h.
◆ T
|
private |
Vector of constraint axis resolved in the predecessor frame.
Definition at line 234 of file Constraint_Loop.h.
The documentation for this class was generated from the following files:
- include/rbdl/Constraint_Loop.h
- src/Constraint_Loop.cc