#include <SegmentedQuinticBezierToolkit.h>
Static Public Member Functions | |
| static double | scaleCurviness (double curviness) |
| static double | calcU (double ax, const RigidBodyDynamics::Math::VectorNd &bezierPtsX, double tol, int maxIter) |
| static int | calcIndex (double x, const RigidBodyDynamics::Math::MatrixNd &bezierPtsX) |
| static int | calcIndex (double x, const std::vector< RigidBodyDynamics::Math::VectorNd > &bezierPtsX) |
| static double | calcQuinticBezierCurveVal (double u, const RigidBodyDynamics::Math::VectorNd &pts) |
| static double | calcQuinticBezierCurveDerivU (double u, const RigidBodyDynamics::Math::VectorNd &pts, int order) |
| static double | calcQuinticBezierCurveDerivDYDX (double u, const RigidBodyDynamics::Math::VectorNd &xpts, const RigidBodyDynamics::Math::VectorNd &ypts, int order) |
| static RigidBodyDynamics::Math::MatrixNd | calcQuinticBezierCornerControlPoints (double x0, double y0, double dydx0, double x1, double y1, double dydx1, double curviness) |
Static Private Member Functions | |
| static void | printMatrixToFile (const RigidBodyDynamics::Math::VectorNd &col0, const RigidBodyDynamics::Math::MatrixNd &data, std::string &filename) |
| static void | printBezierSplineFitCurves (const Function_< double > &curveFit, RigidBodyDynamics::Math::MatrixNd &ctrlPts, RigidBodyDynamics::Math::VectorNd &xVal, RigidBodyDynamics::Math::VectorNd &yVal, std::string &filename) |
| static double | clampU (double u) |
Detailed Description
Definition at line 177 of file SegmentedQuinticBezierToolkit.h.
Member Function Documentation
◆ calcIndex() [1/2]
|
static |
Given a set of Bezier curve control points, return the index of the set of control points that x lies within.
- Parameters
-
x A value that is interpolated by the set of Bezier curves bezierPtsX A matrix of 6xn Bezier control points
aborts -If the index is not located within this set of Bezier points
Given a set of Bezier curve control points, return the index of the set of control points that x lies within. This function has been coded assuming a small number of Bezier curve sets (less than 10), and so, it simply scans through the Bezier curve sets until it finds the correct one.
Computational Costs Quoted for a Bezier curve set containing 1 to 5 curves.
~9-25
Example:
◆ calcIndex() [2/2]
|
static |
◆ calcQuinticBezierCornerControlPoints()
|
static |
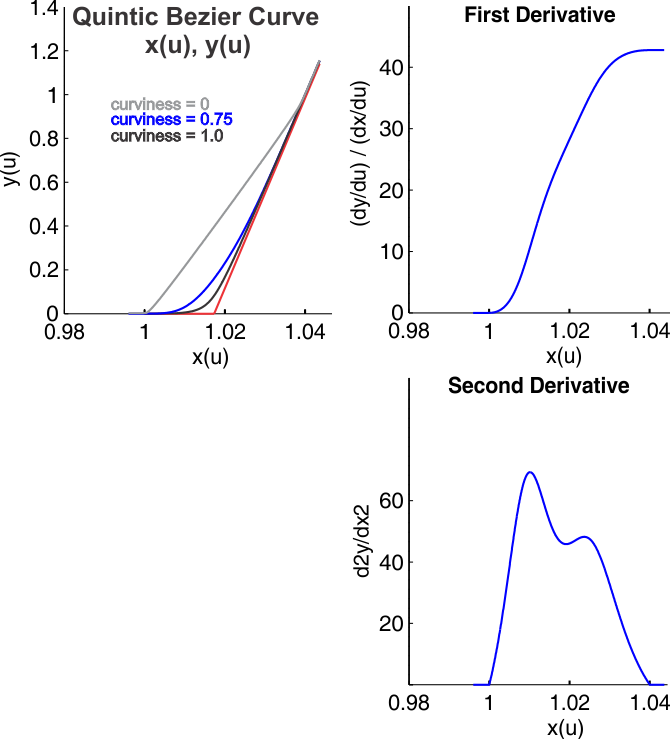
Calculates the location of quintic Bezier curve control points to create a C shaped curve like that shown in the figure. Using a series of these simple and predictably shaped Bezier curves it is easy to build quite complex curves.
- Parameters
-
x0 First intercept x location y0 First intercept y location dydx0 First intercept slope x1 Second intercept x location y1 Second intercept y location dydx1 Second intercept slope curviness A parameter that ranges between 0 and 1 to denote a straight line or a curve
aborts -If the curviness parameter is less than 0, or greater than 1; -If the points and slopes are chosen so that an "S" shaped curve would be produced. This is tested by examining the points (x0,y0) and (x1,y1) together with the intersection (xC,yC) of the lines beginning at these points with slopes of dydx0 and dydx1 form a triangle. If the line segment from (x0,y0) to (x1,y1) is not the longest line segment, an exception is thrown. This is an overly conservative test as it prevents very deep 'V' shapes from being respresented.
- Returns
- a RigidBodyDynamics::Math::MatrixNd of 6 points Matrix(6,2) that correspond to the X, and Y control points for a quintic Bezier curve that has the above properties
Calculates the location of quintic Bezier curve control points to create a C shaped curve that intersects points 0 (x0, y0) and point 1 (x1, y1) with slopes dydx0 and dydx1 respectively, and a second derivative of 0. The curve that results can approximate a line (curviness = 0), or in a smooth C shaped curve (curviniess = 1)
The current implementation of this function is not optimized in anyway and has the following costs:
Computational Costs
~55 flops
Example:
◆ calcQuinticBezierCurveDerivDYDX()
|
static |
Calculates the value of dydx of a quintic Bezier curve derivative at u.
- Parameters
-
u The u value of interest. Note that u must be [0,1]
xpts The 6 control points associated with the x axis ypts The 6 control points associated with the y axis order The order of the derivative. Currently only orders from 1-6 can be evaluated
aborts -If u is outside [0,1] -If xpts is not 6 elements long -If ypts is not 6 elements long -If the order is less than 1 -If the order is greater than 6
- Return values
-
The value of (d^n y)/(dx^n) evaluated at u
Calculates the value of dydx of a quintic Bezier curve derivative at u. Note that a 2D Bezier curve can have an infinite number of derivatives, because x and y are functions of u. Thus
dy/dx = (dy/du)/(dx/du)
d^2y/dx^2 = d/du(dy/dx)*du/dx
= [(d^2y/du^2)*(dx/du) - (dy/du)*(d^2x/du^2)]/(dx/du)^2
*(1/(dx/du))
etc.
Computational Costs
This obviously only functions when the Bezier curve in question has a finite derivative. Additionally, higher order derivatives are more numerically expensive to evaluate than lower order derivatives. For example, here are the number of operations required to compute the following derivatives
Name : flops dy/dx : ~102 d2y/dx2 : ~194 d3y/dx3 : ~321 d4y/dx4 : ~426 d5y/dx5 : ~564 d6y/dx6 : ~739
Example:
◆ calcQuinticBezierCurveDerivU()
|
static |
Calculates the value of a quintic Bezier derivative curve at value u.
- Parameters
-
u The independent variable of a Bezier curve, which ranges between 0.0 and 1.0. pts The locations of the control points in 1 dimension. order The desired order of the derivative. Order must be >= 1
aborts -u is outside [0,1] -pts is not 6 elements long -if order is less than 1
- Returns
- The value of du/dx of Bezier curve located at u.
Calculates the value of a quintic Bezier derivative curve at value u. This calculation is acheived by taking the derivative of the row vector uV and multiplying it by the 6x6 coefficient matrix associated with a quintic Bezier curve, by the vector of Bezier control points, pV, in a particular dimension.
Pseudo code for the first derivative (order == 1) would be
uV = [5*u^4 4*u^3 3*u^2 2u 1 0];
cM = [ -1 5 -10 10 -5 1;
5 -20 30 -20 5 0;
-10 30 -30 10 0 0;
10 -20 10 0 0 0;
-5 5 0 0 0 0;
1 0 0 0 0 0 ];
pV = [x1; x2; x3; x4; x5; x6];
dxdu = (uV*cM)*pV
Note that the derivative of uV only needed to be computed to compute dxdu. This process is continued for all 5 derivatives of x(u) until the sixth and all following derivatives, which are 0. Higher derivatives w.r.t. to U are less expensive to compute than lower derivatives.
Computational Costs
dy/dx : ~50 flops d2x/du2: ~43 flops d3x/du3: ~34 flops d4x/du4: ~26 flops d5x/du5: ~15 flops d6x/du6: ~1 flop
Example:
◆ calcQuinticBezierCurveVal()
|
static |
Calculates the value of a quintic Bezier curve at value u.
- Parameters
-
u The independent variable of a Bezier curve, which ranges between 0.0 and 1.0. pts The locations of the control points in 1 dimension.
aborts -If u is outside of [0,1] -if pts has a length other than 6
- Returns
- The value of the Bezier curve located at u.
Calculates the value of a quintic Bezier curve at value u. This calculation is acheived by mulitplying a row vector comprised of powers of u, by the 6x6 coefficient matrix associated with a quintic Bezier curve, by the vector of Bezier control points, pV, in a particular dimension. The code to compute the value of a quintic bezier curve has been optimized to have the following cost:
Computational Costs
~54 flops
The math this function executes is decribed in pseudo code as the following:
uV = [u^5 u^4 u^3 u^2 u 1];
cM = [ -1 5 -10 10 -5 1;
5 -20 30 -20 5 0;
-10 30 -30 10 0 0;
10 -20 10 0 0 0;
-5 5 0 0 0 0;
1 0 0 0 0 0 ];
pV = [x1; x2; x3; x4; x5; x6];
xB = (uV*cM)*pV
Example:
◆ calcU()
|
static |
This function will compute the u value that correesponds to the given x for a quintic Bezier curve.
- Parameters
-
ax The x value bezierPtsX The 6 Bezier point values tol The desired tolerance on u.
maxIter The maximum number of Newton iterations allowed
aborts -if ax is outside the range defined in this Bezier spline section -if the desired tolerance is not met -if the derivative goes to 0 to machine precision
This function will compute the u value that correesponds to the given x for a quintic Bezier curve. This is accomplished by using an approximate spline inverse of u(x) to get a very good initial guess, and then one or two Newton iterations to polish the answer to the desired tolerance.
Computational Costs
~219 flops
Example:
◆ clampU()
|
staticprivate |
This function will return a value that is equal to u, except when u is outside of[0,1], then it is clamped to be 0, or 1
- Parameters
-
u The parameter to be clamped
- Return values
-
u but restricted to 0,1.
◆ printBezierSplineFitCurves()
|
staticprivate |
- Parameters
-
curveFit a function that evaluates a curve ctrlPts control point locations for the fitted Bezier curve xVal the x values at the control points yVal the y values at the control points filename of the output file.
◆ printMatrixToFile()
|
staticprivate |
This function will print cvs file of the column vector col0 and the matrix data.
- Parameters
-
col0 A vector that must have the same number of rows as the data matrix. This column vector is printed as the first column data A matrix of data filename The name of the file to print
◆ scaleCurviness()
|
static |
This scales the users value of curviness to be between [0+delta, 1-delta] because if curviness is allowed to equal 0 or 1, the second derivative becomes quite violent and the resulting curve is difficult to fit splines to.
- Parameters
-
curviness
- Return values
-
a scaled version of curviness
The documentation for this class was generated from the following file:
- addons/geometry/SegmentedQuinticBezierToolkit.h